ZESPÓŁ
SYNCHRONIZUJĄCY GSS
v WIADOMOŚCI
OGÓLNE
Zespół składa się z czterech
jednakowych modułów MSS0
÷MSS3, sterowanych z procesora ELS. Każdy z modułów
połączony jest z koncentratorem oddalonym dwoma traktami PCM, z centrum
komutacyjnym zaś – dwiema grupami torów LR. Zadania zespołu
synchronizacji są następujące:
a) synchronizacja
pobieranych kanałów rozmównych,
b) dekodowanie
informacji sygnalizacyjnych i meldunków z wieloramki sygnalizacyjnej oraz
przesłanie ich do centrum komutacyjnego,
c) organizacja
wieloramki sygnalizacyjnej w kierunku do koncentratora.
Schemat blokowy zespołu został
przedstawiony w następujący sposób:

UKŁAD
BLOKOWY ZESPOŁU GSS
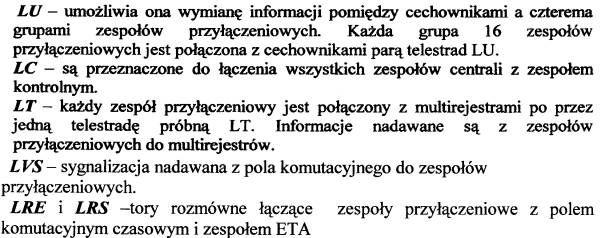
ü SCHEMAT IDEOWY MODUŁU
MSS ZESPOŁU GSS
W skład jednego modułu wchodzą następujące
układy :
a)
układ CRM
synchronizacji odbieranych kanałów PCM,
b)
układ wymiany
informacji systemem kanał w kanał,
c)
układ wymiany
meldunków systemem semafor.
Schemat
ideowy jednego modułu MSS zespołu GSS przedstawiono w następujący
sposób:
SCHEMAT IDEOWY MODUŁU MSS
v
SYNCHRONIZACJA
ODBIERANYCH SYGNAŁÓW KANAŁÓW
PCM
Ciągi impulsów
zegarowych koncentratora odległego różnią się w fazie i częstotliwości od
analogicznych ciągów centrum komutacyjnego,w którym znajduje się zespół
synchronizacji GSS. Synchronizacja odbieranych sygnałów polega na
kompensacji tych różnic w złożonych granicach. Dokonuje się tego, kontrolując
zapis za pomocą wybranego taktu spośród ciągów impulsowych
ω0÷ω7.
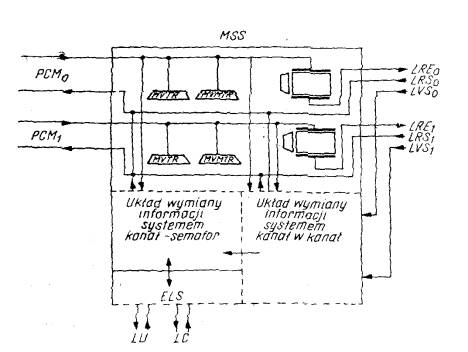
ü SCHEMAT
LOGICZNY ZESPOŁU
SYNCHRONIZACJI KANAŁÓW ROZMÓWNYCH
Każdy kanał VTi odbierany traktem PCM
wpisywany jest do rejestru R1 w rytmie zegara koncentratora
odległego HD. Tak więc informacja kanału VTi znajdzie
się w rejestrze R1 w chwili ti+1, w rejestrze zaś R2
– w chwili ti+1 .Schemat logiczny przedstawiony jest w następujący
sposób:
SCHEMAT LOG. ZESPOŁU SYNCH. KANAŁÓW ROZM.
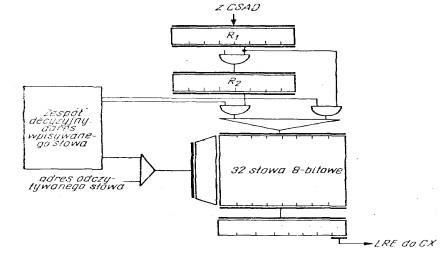
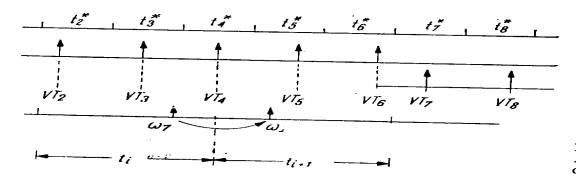
Na poniższym rysunku ukazane są
zależności czasowe dla przypadku, gdy zegar centrum komutacyjnego [ HL ], jest
opóźniony w stosunku do HD. Kanał VT7 nie zostanie
wpisany do pamięci, a więc zostanie stracony.
UKŁAD KANAŁÓW HL < HD
W sytuacji przedstawionej na powyższym
rysunku, aby zapobiec stracie VTi należy dokonać zapisu nieco
wcześniej, co zostało zilustrowane schematycznie na poniższym rysunku:
ADRES ZAPISU
DLA HL < HD
Decyzję taką podejmuje układ decyzyjny
adresu zapisu, kontrolujący wzajemne przesuwanie się zegarów HL i HD. W
zobrazowanym przykładzie układ decyduje o dokonywaniu zapisu w chwili
wyznaczonej impulsem ω3, zamiast w chwili ω7.
POWRÓT